I thought that I should add both the Numbers spreadsheet that is my “parts database,” as well as the Python script I use to create an orderable BOM from the BOM exported from a Kicad schematic and that parts database.
An upcoming project requires a MIDI connection over USB. The product is simple: it’s a MIDI-controlled “thing” with some front-panel buttons and knobs and LED indicators as the user interface. The buttons and knobs control device parameters with status reflected by the LEDs. If a host computer is connected to the device over USB, then that computer can control it with a “virtual” front panel, and also changes made on the real panel are sent to the computer so the device and the computer can remain synchronized.
USB has supported MIDI devices, as a part of the USB Audio Device Class, since 1999, and the three major operating systems have built-in drivers for them. MIDI itself has been around even longer. Both specifications are mature, well-understood and well-supported.
An embedded microcontroller can be used to manage the USB interface and the other digital stuff. At first glance, implementing USB MIDI on a micro seems straightforward. After all, there is USB MIDI support for Arduino, and there’s a project for the STMF32 parts, and of course there’s the LUFA library which targets various Atmel parts.
For various reasons, I prefer Silicon Labs micros. While none of SiLabs’ USB micros (both 8-bit 8051 and 32-bit ARM) support High Speed, that is fine, as the USB MIDI class was specified for Full Speed. SiLabs provides an Eclipse-based IDE called Simplicity Studio which works as well as can be expected. The Keil C51 compiler tools are used for building C8051 and EFM8 projects (and the gcc compiler is used for the EFM32 ARMs) and C2-based programming and debug is built in. Finally, SiLabs provides a decent USB stack to handle most of the details of the USB interface.
The SiLabs USB stack doesn’t have support for the MIDI device class. And they don’t have an example of how to use the stack with devices that use Bulk transfers. OK, no problem, it’s time to write some code!
The USB MIDI device described here has two functions. One, it implements a USB-to-serial-MIDI dongle like the various M-Audio things, so it will use a UART to drive and receive messages over the standard MIDI DIN connector interface. Two, it allows the host to control “features” of a device, in this case an RGB LED, as well as allowing the device to send user-interface control changes (buttons, knobs) back to the host.
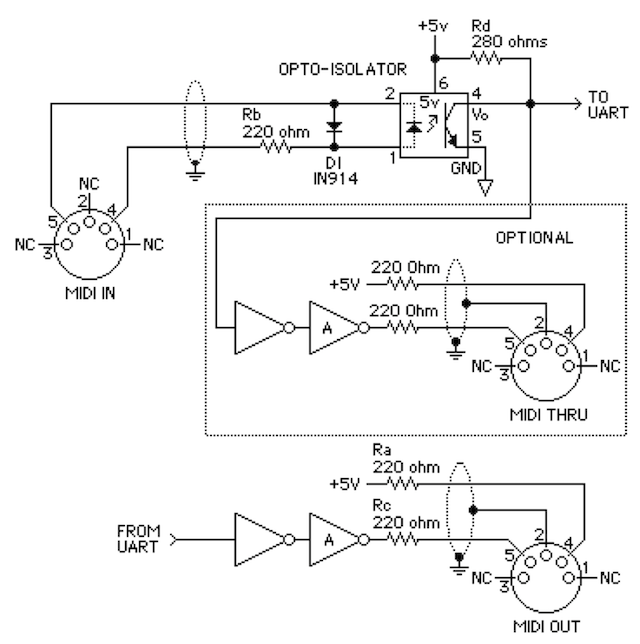
It will run on the SiLabs EFM8UB2 STK. Since MIDI requires an optoisolated receiver, a simple board must be built to support that. A schematic is shown later.
I will assume that the reader is familiar with the MIDI Specification, both at the physical layer and the protocol layer, so I won’t rehash any of that. I will point out where USB-MIDI and the standard MIDI overlap and where the former extends the latter.
USB-MIDI Device Class Basics
Note to the reader: it is helpful to have the USB MIDI and the USB Audio Class specs available. The USB MIDI class is a subclass of sorts under the Audio Class umbrella. The device descriptor requires an Audio Control Interface. For the actual MIDI data, the device must include one or more MIDI Streaming interfaces instead of an Audio Streaming interface. (The device can include one or more Audio Streaming interfaces if desired and if the converter hardware is available.)
The topology of a USB MIDI device function is described with a few different blocks and the connections between them. It must have a USB-MIDI Converter, and one or more Jacks are used to describe the source or sink of a MIDI data stream within the device. Elements are used to describe engines that convert MIDI data to audio or the converse. For purposes of this example, we do not use Elements. (This might change.) Also, the USB MIDI device class supports “Transfer Endpoints,” which are used to exchange data between the host and any defined Elements, and again for this example we do not use them.
There are two types of Jacks: Embedded and External. The easiest way to think of these two types is that Embedded Jacks describe connections where the MIDI data stay within the device, and External Jacks describe physical connections such as the standard DIN jack driven by a 31.25 kbps asynchronous serial transmitter. I believe that the proper use of Elements would be to have them be the source and sink for data going over Embedded Jacks, and a future revision of this code might take advantage of that. For now, I use External Jacks to describe how buttons are read and LEDs are set.
USB-MIDI “Cables”
Full-Speed MIDI has a wire rate of 12 Mbps, which is significantly faster than the MIDI UART’s rate of 31.25 kbps. This allows for one of the USB MIDI Class’s more interesting features, which is multiplexing multiple MIDI streams. This is done using virtual “ports” which are called “cables” in the USB MIDI spec. Up to sixteen “cables” can be muxed onto one USB Endpoint. It is as if each device had 16 MIDI Out ports and 16 MIDI In ports, of course without the nest of wires. And with the standard sixteen channels per virtual “cable,” a lot of MIDI messages can be sent and received on one USB cable.
MIDI Device Class Descriptors
The internet has very few examples of MIDI Device class descriptors. The aforementioned LUFA code has a generic descriptor, but it’s not clear what’s going on with it. I have a couple of USB-MIDI devices and a bus analyzer, so I was able to dump the descriptors for them to see what mine might look like. And between those dumps and the USB-MIDI spec, I came up with descriptors which work with the device design I described above. I apologize for including the Silicon Labs macros which are used to determine memory space. The descriptors are in a file conveniently called descriptors.c in the source code.
The various constants must be defined somewhere, and in this case the first two are in the library source efm8_usb.h, as they are standardized and do not vary from design to design. The last two are design-dependent, and are in descriptors.h which is intended to be changed by the user.
The entries for bDeviceClass and bDeviceSubclass are zero, which indicates that the device is defined at the Interface level (which is pretty standard).
Next is the Configuration Descriptor. This is what tells the host about the device, and it tells how many Interfaces are included. Each Interface has both Standard and Class-specific descriptors.
In this design, there are two interfaces. One is the mandatory (for an Audio Class device) Audio Control interface, which tells the host that it’s an Audio Class device. This interface has two descriptors, the mandatory Standard Interface Descriptor and a Class-Specific Interface Descriptor. The second interface is the MIDI Streaming interface, which describes how the device handles data. This second interface has a mandatory Standard Interface Descriptor, and a Class-Specific Interface descriptor. A large part of the CSIF descriptor are the eight Jack descriptors, which tells the host about the device’s MIDI data routing. Finally, because the MIDI streaming interface presents MIDI In and MIDI Out data paths, there are two Endpoints for them. Each Endpoint has a Standard Endpoint descriptor and a Class-Specific Endpoint Descriptor.
/*
* This is the Configuration Descriptor.
*/
SI_SEGMENT_VARIABLE(configDesc[],
const USB_ConfigDesc_t,
SI_SEG_CODE) =
{
// Configuration Descriptor header
USB_CONFIG_DESCSIZE, // bLength
USB_CONFIG_DESCRIPTOR, // bDescriptorType
htole16(0x0085), // wTotalLength, 133 bytes
2, // bNumInterfaces
1, // bConfigurationValue
4, // iConfiguration
CONFIG_DESC_BM_RESERVED_D7, // bmAttributes
CONFIG_DESC_MAXPOWER_mA(100), // bMaxPower
// Standard Interface Descriptor for Audio Control Interface
USB_INTERFACE_DESCSIZE, // bLength
USB_INTERFACE_DESCRIPTOR, // bDescriptorType
0, // bInterfaceNumber
0, // bAlternateSetting
0, // bNumEndpoints, this
// uses the control endpoint
USB_CLASS_AUDIO, // bInterfaceClass
USB_AUDIO_AUDIOCONTROL, // bInterfaceSubClass
0, // bInterfaceProtocol
5, // iInterface
// Class-Specific Audio Control Interface Descriptor
sizeof(USB_MIDI_CS_AC_IF_Descriptor_t), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_HEADER, // bDescriptorSubtype
htole16(0x0100), // bcdADC
htole16(0x0009), // wTotalLength
1, // bInCollection
1, // baInterfaceNr
// Standard Interface Descriptor for MIDI Streaming Interface
USB_INTERFACE_DESCSIZE, // bLength
USB_INTERFACE_DESCRIPTOR, // bDescriptorType
1, // bInterfaceNumber
0, // bAlternateSetting
2, // bNumEndpoints
USB_CLASS_AUDIO, // bInterfaceClass
USB_AUDIO_MIDISTREAMING, // bInterfaceSubClass
0, // bInterfaceProtocol
6, // iInterface
// Class-Specific Interface Descriptor for MIDI Streaming Interface
sizeof(USB_MIDI_CS_MS_IF_Descriptor_t), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_HEADER, // bDescriptorSubtype
htole16(0x0100), // BcdADC
htole16(0x0061), // wTotalLength
// Class-Specific Interface Descriptor for MIDI Jack 1.
// This jack is the sink for data from the USB host and intended for
// the "onboard" "port," which controls the RGB LED.
// This should appear as Outport MIDI Port 1 to the host computer.
// It connects to the USB OUT Endpoint 1.
sizeof(USB_MIDI_In_Jack_Descriptor_t), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_IN_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_Embedded, // bJackType
JACK1_EMBIN, // bJackID
0, // Jack index of a string descriptor describing this jack
// Class-Specific Interface Descriptor for MIDI Jack 2.
// This jack is the source of MIDI packets intended to be used by the
// "onboard" "port" which controls the RGB LED. It connects to one
// source, which is Jack 1.
// It is an "External" type because it connects to stuff outside of
// the USB MIDI function. Can this be embedded?
USB_MIDI_OUT_JACK_DESCRIPTOR_SIZE(1), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_OUT_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_External, // bJackType
JACK2_EXTOUT, // bJackID
1, // bNrInputPins
JACK1_EMBIN, // baSourceID
1, // baSourcePin
0, // iJack
// Class-Specific Interface Descriptor for MIDI Jack 3.
// This jack is an input to the USB MIDI function, and it gets its
// data from the changes to the buttons and joystick.
sizeof(USB_MIDI_In_Jack_Descriptor_t), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_IN_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_External, // bJackType
JACK3_EXTIN, // bJackID
0, // iJack
// Class-Specific Interface Descriptor for MIDI Jack 4.
// This jack is an output from the USB MIDI function, and it feeds the
// USB In Endpoint. It gets its data from Jack 3, that is, the buttons
// and joystick.
// This should appear as MIDI INPUT Port 1 to the host computer.
USB_MIDI_OUT_JACK_DESCRIPTOR_SIZE(1), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_OUT_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_Embedded, // bJackType
JACK4_EMBOUT, // bJackID
1, // bNrInputPins
JACK3_EXTIN, // baSourceID
1, // baSourcePin
0, // iJack
// Class-Specific Interface Descriptor for MIDI Jack 5.
// This is the source of the MIDI data packets intended for the serial
// MIDI OUT port. It should appear as MIDI OUTPUT Port 2 to the host.
// It connects to the USB OUT 1 Endpoint.
sizeof(USB_MIDI_In_Jack_Descriptor_t), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_IN_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_Embedded, // bJackType
JACK5_EMBIN, // bJackID
0, // iJack
// Class-Specific Interface Descriptor for MIDI Jack 6
// This is the sink for the MIDI data packets intended for the serial
// MIDI OUT port. It gets its data from Jack 5.
USB_MIDI_OUT_JACK_DESCRIPTOR_SIZE(1), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_OUT_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_External, // bJackType
JACK6_EXTOUT, // bJackID
1, // bNrInputPins
JACK5_EMBIN, // baSourceID
1, // baSourcePin
0, // iJack
// Class-Specific Interface Descriptor for MIDI Jack 7
// This is the sink for data coming from the serial MIDI IN port, to
// go back to the host computer.
sizeof(USB_MIDI_In_Jack_Descriptor_t), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_IN_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_External, // bJackType
JACK7_EXTIN, // bJackID
0, // iJack
// Class-Specific Interface Descriptor for MIDI Jack 8
// This is the source of the data for the USB IN Endpoint. It gets its
// data from Jack 7, which is fed by the DIN MIDI IN Port.
// This connects to USB IN Endpoint 1.
USB_MIDI_OUT_JACK_DESCRIPTOR_SIZE(1), // bLength
USB_CS_INTERFACE_DESCRIPTOR, // bDescriptorType
MIDI_CS_IF_OUT_JACK, // bDescriptorSubtype
MIDI_JACKTYPE_Embedded, // bJackType
JACK8_EMBOUT, // bJackID
1, // bNrInputPins
JACK7_EXTIN, // baSourceID
1, // baSourcePin
0, // iJack
// Standard Endpoint Descriptor for Bulk In Endpoint 1
USB_ENDPOINT_DESCSIZE, // bLength
USB_ENDPOINT_DESCRIPTOR, // bDescriptorType
0x81, // bEndpointAddress
USB_EPTYPE_BULK, // bmAttributes
htole16(SLAB_USB_EP1IN_MAX_PACKET_SIZE),// wMaxPacketSize
0, // bInterval
// Class-specific Endpoint Descriptor for Bulk In Endpoint 1
USB_MIDI_CS_STREAMING_BULK_ENDPOINT_SIZE(2), // bLength
USB_CS_ENDPOINT_DESCRIPTOR, // bDescriptorType
USB_MIDI_CS_EP_MS_GENERAL, // bDescriptorSubtype
2, // bNumEmbMIDIJack
JACK4_EMBOUT, JACK8_EMBOUT, // baAssocJackID
// Standard Endpoint Descriptor for Bulk Out Endpoint 1
USB_ENDPOINT_DESCSIZE, // bLength
USB_ENDPOINT_DESCRIPTOR, // bDescriptorType
0x01, // bEndpointAddress
USB_EPTYPE_BULK, // bmAttributes
htole16(SLAB_USB_EP1OUT_MAX_PACKET_SIZE),// wMaxPacketSize
0, // bInterval
// Class-specific Endpoint Descriptor for Bulk Out Endpoint 1
USB_MIDI_CS_STREAMING_BULK_ENDPOINT_SIZE(2), // bLength
USB_CS_ENDPOINT_DESCRIPTOR, // bDescriptorType
USB_MIDI_CS_EP_MS_GENERAL, // bDescriptorSubtype
2, // bNumEmbMIDIJack
JACK1_EMBIN, JACK5_EMBIN // baAssocJackID
};
USB-MIDI “Jacks”
The relationship between the Jacks, and between the Jacks and the Endpoints is likely the most confusing aspect of this. Remember that the Jacks describe the inputs to and the outputs from the USB-MIDI function. And what might seem even more confusing is that more than one Jack can be associated with a particular part of the function. So let’s look at this in more detail.
Recall that this example design has four MIDI ports. Two are the standard serial ports (wired MIDI In and Out on DIN connectors) and the other two are a virtual “Out” port that lets the host control stuff (the RGB LED in this example design) and a virtual “In” port that sends button-press data back to the host. This means there are four data “paths” and we need eight Jacks — four In, four Out — to describe this routing, and the descriptors above show them. Pay attention to the Class-Specific Endpoint Descriptors, as they specify how data are routed to or from the Endpoint from or to the Jacks, and note that the endpoints each feed two Jacks.
Data path from host computer to control RGB LED:
OUT Endpoint 1 -> Jack 1 -> Jack 2 -> LED
Data path from joystick and button handler to host computer:
Button handler -> Jack 3 -> Jack 4 -> IN Endpoint 1
Data path from host computer to DIN MIDI OUT port:
OUT Endpoint 1 -> Jack 5 -> Jack 6 -> serial transmitter/MIDI OUT DIN port
Data path from DIN MIDI IN port to host computer:
Serial receiver/MIDI IN DIN port -> Jack 7 -> Jack 8 -> IN Endpoint 1
But … what about “Cables?”
Indeed, what about cables? The descriptors say nothing about them at all! It seems obvious that with one OUT Endpoint, we connect to the MIDI OUT DIN connector and the LED on different cables, and also the buttons/joystick connect to the one IN Endpoint on a different cable from the MIDI In DIN connector. Thus the USB OUT Endpoint connects to two cables and the USB IN Endpoint connects to two cables. (That’s why the Jacks are specified in the Class-Specific Endpoint Descriptors.)
All the descriptors do is to tell the host computer about the topology of the MIDI “network,” if you will, associated with the device. They don’t indicate how that topology is actually implemented. That’s up to the firmware. But how does the firmware know how to actually do all of this routing that the device told the host it can do? Well, first, we must introduce the USB-MIDI Event Packet (MEP).
The USB-MIDI Event Packet
Readers familiar with standard serial MIDI know that MIDI Messages are sent in packets of one, two or three bytes for non-SysEx messages, and SysEx messages can have any number of bytes between the SOX and EOX status bytes. USB-MIDI standardizes on a four-byte MIDI Event Packet, shown here:
MIDI Event Packet
Byte 0 is the packet header. Its upper nybble is the four-bit Cable Number. This tells the device which cable the packet came from (in case of USB IN Endpoints) or which cable is the destination for the packet (for USB OUT Endpoints). The lower nybble of the header is the Code Index Number, which indicates how the remaining three bytes of the packet should be interpreted. For most of the packets, the three payload bytes are a standard MIDI message, so the CIN can appear to be redundant. But this is also how multibyte SysEx messages can be broken up into three-byte chunks to fit into the USB-MIDI Event Packet.
MIDI Event Packets on the USB and this example design
For USB OUT Endpoint MIDI transactions: the host will fill its USB OUT packets with one or more MEPs, up to the Endpoint’s maximum packet size, based on the MIDI traffic generated by applications. The USB packet ends up in the device micro’s Endpoint buffers in a device-specific manner. At some point, the micro’s USB interrupt is asserted and parsed and now we have our Event Packets sitting in a buffer, waiting to be handled. The handler itself is in the main() function in EFM8-USB-MIDI_main.c.
The micro firmware should pop an MEP from the buffer and inspect its header. The Cable Number and the Code Index Number tell the micro how to handle the packet. In the case of our simple example, Cable Number 0 is the “virtual” device where the USB OUT controls the RGB LED. Cable Number 1 goes to the serial MIDI Out port. (My unproven assumption is that since the Class-Specific Endpoint Descriptor tells the host how many “Ports” or cables the device has, the host won’t do something silly like send a packet to a non-existent Cable Number.)
Packets intended for the hardware serial port have the CIN parsed and a standard MIDI message packet is built from the MEP. That packet is then sent to the serial transmitter’s holding FIFO.
For packets intended for the “virtual” port, which controls the RGB LED, the first payload byte is inspected. We use MIDI Control Change messages to set the brightnesses of the three colors. The message indicates which control (in byte 2 of the Event Packet) and also the control’s value (in byte 3). If the control matches one of the four we expect (I chose GP Control 5, 6, 7 and 8), the value is used to set the LED color and intensity. Other controls are simply ignored.
For USB In Endpoint MIDI Transactions: This is where the micro takes either events on the buttons and joystick, or messages from the serial MIDI IN connection, and builds MIDI Event Packets and sends them back to the host.
For the former, periodically the micro polls the state of the joystick and buttons and builds a report with the state of those controls. Then a parser in main() tests the state of each control, and if toggled, a MEP is built for a Control Change message with the appropriate state, and that packet is written to the micro’s USB device endpoint FIFO to be sent off to the host.
For the latter, MIDI messages coming from the serial MIDI In must be parsed and one or more proper MEPs built. The parsing is done by a state machine in the file midi_uart.c in the function MIDIUART_readMessage(). This parsing is rather more complex than one might expect, as a message might not be fully received when that function is called. Also it needs to handle MIDI running status and the varying sizes of SysEx messages. In any case, the function builds MEPs on the fly and when one is completed, the function returns the MEP in a point argument and returns true, and the main() function will then just write the entire MEP to the Endpoint buffer.
The EFM8UB2 and the Silicon Labs EFM8 USB stack
There is some discussion of how to use this stack over at the SiLabs 8-bit MCU forum, and I had some back and forth with SiLabs tech support to get to the bottom of how the part works. It turns out that there are some important details left out of the part documentation.
The code uses the efm8_usb library. The basic idea, after getting the descriptors correct and having it actually enumerate on the USB, is that you access the stack through two API functions, USBD_Write() and USBD_Read(), and you get access to read data (from a USB OUT transaction) using the transfer-complete callback USBD_XferCompleteCb().
USBD_Write()
The USBD_Write(), to write data to the host for a USB IN transaction, is relatively straightforward. You just pass to that function a pointer to a buffer containing the data to send, the size of that buffer and the Endpoint number, and off it goes. You can also indicate whether you want a callback after the transaction is complete, but for this case none is needed. I did find it to be necessary to ensure that the endpoint was not busy before calling USBD_Write(). Examples of this are in my main() function in EFM8-USB-MIDI_main.c.
USBD_Read()
The USBD_Read() is not as simple, and the lack of documentation about how it is supposed to work doesn’t help. (This is why my question on the forum was “when are you supposed to call this function?”) Despite its name, this function doesn’t return a buffer full of data from the last USB OUT transaction. Rather, it hands a buffer over to the stack and then the stack indicates internally that it is ready to handle USB OUT transactions. It “primes the pump,” so to speak. But this still doesn’t answer my question, so let’s do that now.
First, enable the USBD_DeviceStateChangeCb() callback. This will get called after the device has successfully enumerated on the USB, and the stack sets the device state to “configured.” This means that the device is now on the bus and ready for action. The host may now start sending USB MIDI packets to the device. First, create a global variable that is the size (in bytes) of the OUT Endpoint’s maximum packet size. (Realize that the Endpoint packet is not the same as the MIDI Event Packet!)
I put this line in the source file callback.c, the same file which contains the callbacks described above. (The file is generated by Simplicity Studio’s configurator, but thankfully it is not overwritten by later configuration changes.) Since we use this global variable in other places, you must extern it wherever else you use it (or put it in a header with the extern decoration).
In this callback, then, we do the initial call to USBD_Read():
And now the device is ready to handle the first USB transaction on Endpoint Out 1. Note that we have set the “use callback” argument to TRUE.
In the endpoint interrupt handler (part of the efm8_usb stack) the first thing that happens is that the number of bytes in the Endpoint FIFO is fetched. Then that number of bytes is popped from that FIFO and stored in our Endpoint buffer (passed in the call to USBD_Read()). At that point, we have one or more MIDI Event Packets sitting in our buffer, waiting to be handled, and this is when the transfer-complete callback is invoked.
In the callback we make sure we’re handling EP1OUT’s event. Then we build one or more MIDI Event Packets and push them onto a FIFO for later parsing. There’s a big assumption here, which is that the number of bytes transferred to our Endpoint buffer in the ISR is a multiple of the size of the MIDI Event Packet (four bytes). It might be a good idea to always check for that to be true, and then figure out how to handle it, lest we go off into the weeds with the buffer pointer.
Back in the main program loop, the call to USBMIDIFIFO_Pop (&usbmep) checks to see if the FIFO written by the callback actually has anything in it, and if so, one Event Packet at a time is popped and parsed.
So, really, when do we call USBD_Read()?
And the above still does not answer the question, “… so when do we call USBD_Read()?” I’m afraid that the answer is rather implementation-dependent and it also involves a detail of how the EFM8UB2’s USB serial-interface engine.
In most cases, a device is able to handle each USB OUT transaction’s input (to the micro) data in a timely manner, that is, before the next packet comes in. That is partially the case here, as MIDI Event Packets for the “virtual” Cable (which lights the RGB LED) is handled immediately and there’s no concern about not being ready for the next packet. So in that case, we can call USBD_Read() again immediately after we’ve parsed a packet.
But our example device has a complication: one of its functions is as a “USB to MIDI converter” dongle, so all MIDI Event Packets on the “real” Cable are just handed off to the UART that implements the serial transmitter for the DIN connector. And the rub is that the UART at 31.25 kbps is much much slower than Full Speed USB, and if you’re sending packets from a computer over USB, you can eventually overflow any FIFO you can put in front of your serial transmitter.
USB does offer the correct way for a device to throttle the bus in this sort of circumstance. Generally, in response to a transfer from the host, the device will send an ACKnowledge packet back. This lets the host know it can send more data. However, if the device is temporarily unable to deal with new data, it should respond by sending a No Acknowledge (NAK) packet back to the host. The host will see that, and at some point later it will retry sending the previous packet that the device was unable to handle. If the device NAKs again, the host will retry again, and keep doing so until the device finally accepts the packet.
I challenge you to read through the EFM8UB Reference Manual and tell me where it says how you are supposed to have the device NAK a transaction. Spoiler: you won’t find it. But SiLabs tech support was helpful in this, and there’s a simple and effective answer.
For each enabled Endpoint (IN or OUT) in the design, the EFM8UB2 has a FIFO. For USB OUT transactions, the deserialized data bytes are written to that FIFO. When the transactions are complete, the USB interface engine automatically sends the ACK response and then it interrupts the processor, which then figures out what to do.
But, for the OUT transactions, that interrupt is asserted only if a call to USBD_Read() was made. The interface continues to ACK each transaction. If no call, then the FIFO continues to fill as packets are received. And at some point, that FIFO is full. And when the FIFO is full, the USB interface will no longer ACK transactions, but rather it NAKs them.
Therefore, the USB interface was designed to do exactly what is required in the case when the device is not ready to deal with new data. It’s just not documented.
When the device is ready to deal with new data, all it needs to do is call USBD_Read() and then the USB interrupt will be immediately re-enabled, which means the ISR will get called right away and the oldest data in the FIFO will be transferred to the user buffer. And as the Endpoint FIFO empties, the host is re-trying the packet that was NAKed and eventually it will be ACKed and accepted. So no data packets are lost. (I should point out that this applies only to Bulk and Interrupt transactions, and not to Isochronous transactions, which are never NAKed and anyway cannot be retried.)
Back to our example, which is where we want to transmit received MIDI Event Packets out over the much slower serial port. In this case, those packets are re-formatted for the serial MIDI format and the packets are written to a FIFO that’s in front of the serial transmitter. If that FIFO gets full, obviously it cannot accept more packets. So after receiving an MEP and dealing with it (remember it might be for the internal “virtual” port), we see if there’s room for more in serial packet FIFO, and if so, then we’ll call USBD_Read() again. If there is no room in the FIFO, then we don’t, and let the serial transmitter pop bytes from it and eventually it has room again, and we can re-arm the endpoint and continue.
This example
The source code is available here (.zip). It was created using Simplicity Studio 4 and its Hardware Configurator, and as noted above it targets the EFM8UB2 STK, so as part of the design set-up it pulled in the various BSP features of interest (the joystick, the buttons, the RBG LED). I created directories called usb_audio, which has a couple of headers which define things, as well as the implementation of the USB-MIDI Event Packet FIFO. I also created a directory called midi, which also has useful defines. The most interesting stuff is in midi_uart.c. This is where you will find the code that implements the FIFOs in front of the micro’s UART1, and the MIDIUART_readMessage() function, which parses MIDI messages from the serial receiver and creates MIDI Event Packets.
Unzip and import into your Simplicity Studio 4 workspace in the usual way. It should build for the EFM8UB20F64G-x-QFP48 without incident, and it can be loaded onto the STK directly. In order to use the old-style serial MIDI interface, you need to build up a little board that connects to the pins for UART1. A reasonable schematic is here (taken directly from the MIDI spec). A 6N138 optoisolator works well.
MIDI interface hardware
Some final comments. First and foremost, this is meant to show valid USB-MIDI Class descriptors and implement a USB-to-MIDI converter like the M-Audio Uno. It also shows how incoming (via USB Out) messages can be parsed and used to control something on a board, and it shows how to build messages from button presses to report user-interface changes back to the host.
It is not a synthesizer/sound-generator module, although there’s no reason why one cannot expand on this to do so. MIDI Note-On and Note-Off messages are easily parsed and used to do what their names imply. (Perhaps one could use the micro’s PWM and play different-frequency notes based on the Note-On and Note-Off messages.)
Also, it is not intended to be the be-all/end-all explanation of how USB-MIDI is supposed to work.
I have created a set of Kicad schematic and footprint libraries. The library archive is available here.
These instructions are for Mac users.
After downloading, copy the archive to your user application support directory at /Users/YourAccountName/Library/Application Support/ and unarchive it (double-clicking in the Finder suffices). It will create a folder in the application support directory called kicad. This is the standard directory for Kicad libraries. Some users might wish to put the libraries into the global library directory, /Library/Application Support/kicad.
Inside that directory are the schematic symbol libraries (in library), the footprint libraries (in modules) and any 3D models I might have (in modules/package3d). The scripting directory has some plug-ins, notably the Python scripts which are used to generate footprints.
The plugins directory has some XSL scripts, most notably the bom2csv.xsl script which is used to generate bills of material from EESchema.
The template directory has a couple of default project templates.
The help directory has the PDF-format manuals for all of the Kicad programs.
Setting up EESchema to recognize schematic libraries
You need to tell EESchema where to find the schematic symbol libraries. From EESchema’s main menu, choose Preferences => Component Libraries. A dialog pops up:
Initially it might be populated by Kicad default libraries. (You may have gotten dire warnings from EESchema when you first launched it.) Go through and select and delete each of those default libraries.
Next, make sure that the libraries you unarchived earlier are on one of the paths listed under “Current search path list.” If not, add the path to the search list by hitting the “Add” button next to “User defined search path” and mousing around to that directory (in my case, it’s /Users/andy/Library/Application Support/kicad/library).
Then, hit the “Add” button next to the list of Component library files and selecting each library. Now all of the libraries should be available to use for schematic entry.
Please note: As you add components to the schematic, they will also be added to a file created automagically in your project directory called projectname-cache.lib. DO NOT delete this file! If you do, all of the symbols you added to the design will be lost. (Unlike pcbnew, the current eeschema file format does not embed the symbols in the sheet schematic file, and instead uses this cache. The Kicad developers indicate that they will revise the schematic file format to eliminate this weirdness and embed the symbol in the schematic file.)
Once the library list is set up, you should be able to browse the libraries from within EESchema and place the symbols onto your sheets.
Setting up the Footprint Libraries for use with pcbnew
You tell pcbnew where to find footprints by setting an environment variable and then using that environment variable in a list called a “Library Table.” This sounds complicated but it’s very simple.
First, we’ll set the environment variables. These are mainly useful for those who use Kicad on different machines which might have different library locations, for example working on a Mac and then on a Windows machine. From the Kicad project manager main menu, choose Preferences => Configure Paths. The following dialog pops up:
For our purposes, ignore the KIGITHUB line; that is useful if one wishes to access the community footprint libraries that are served by Github.
The KISYSMOD and KISYS3DMOD paths must be set to the directories where you find the footprints and the 3D models, respectively. You can see that here I’ve set them to the correct locations. If they are not correct, or do not exist, then double-click on an incorrect path and enter the correct one. Click OK to save.
Next, you need to create or modify a library table. This is the file that maps the footprint library locations to a pointer that is used in pcbnew to find the footprints. Again, this is all so that you can store the libraries anywhere in the file system on any computer, and as long as the entries in the file table are correct, pcbnew can find the footprints.
By default, the footprint library table is called fp-lib-table and it lives in the directory /Users/yourname/Library/Preferences/kicad. It is a text file and can be opened and changed by any editor. My current library table file, which references all of my PCB libraries, is here.
Modifying the library table is easy. From the pcbnew main menu, choose Preferences => Footprint Libraries Manager. (You may also prefer the Wizard.) This opens a dialog like this:
Here you the location and the contents of my library table. As of Kicad stable 4.0.0, the footprint library is actually a directory with the suffix “.pretty,” and inside that directory are the individual footprints within that library.
For each library, you give it a “nickname,” which is a short name for the library. I recommend making the nickname the same as the library directory sans the .pretty suffix. (Don’t confuse yourself.) If the nickname is the same on all of your different machines, pcbnew will never have a problem finding the library.
Next, note the library path includes the ${KISYSMOD}/ prefix. This text string invokes the environment variables for the library location, and it’s the hook which lets you put the library anywhere in the filesystem and pcbnew will be able to find it. The environment variables are shown at the bottom, and you can change them as you need.
For the most part, “Plugin Type” will be Kicad, which is the “.pretty” format. “Legacy” libraries are in an ancient format Kicad used to use and is now deprecated. Those libraries can be read but not modified. (If they are modified, they are automatically upgraded to the new format.) You can also directly use, but not modify, EAGLE- and gEDA-format footprint libraries. (Note that you cannot use EAGLE or gEDA symbol libraries in your schematics.)
Ignore the “options” for now. And if you prefer, you can enter a short description of the libraries, in case the name itself is insufficient.
Once the library table is set up, it can be used when importing a netlist generated by EESchema, as long as the symbols in the schematic have proper “footprint” entries (all of mine do). If you create your own symbols, it is not strictly necessary to embed a footprint link in them; you can use the CvPCB program within EESchema through the Tools => Assign Component Footprint” menu option. But I don’t recommend this design flow. Create symbols with reasonable names that somehow indicate footprint, and then marry the footprint to the symbol by making sure that the symbol’s “Footprint” field has a valid entry.
Generating a Bill of Materials
You will note that each of the symbols library has a custom part number field called PN, and that field is always filled. This field holds a key into a master parts list I created. The parts list is here, as a zipped Apple Numbers spreadsheet, and here as a zipped CSV export of that database.
A python script called bomgen.py is used to parse the BOM exported from EESchema and look up the parts against the CSV parts list. Put the script and PartsDatabase.csv into the same directory as the CSV BOM exported by EESchema. Run the script from the Terminal like such:
You will see messages as the BOM is parsed, and will be greeted at the end with a success or failure message. The result is a CSV file called FinalBOM.csv.